Die Referenzsensorik
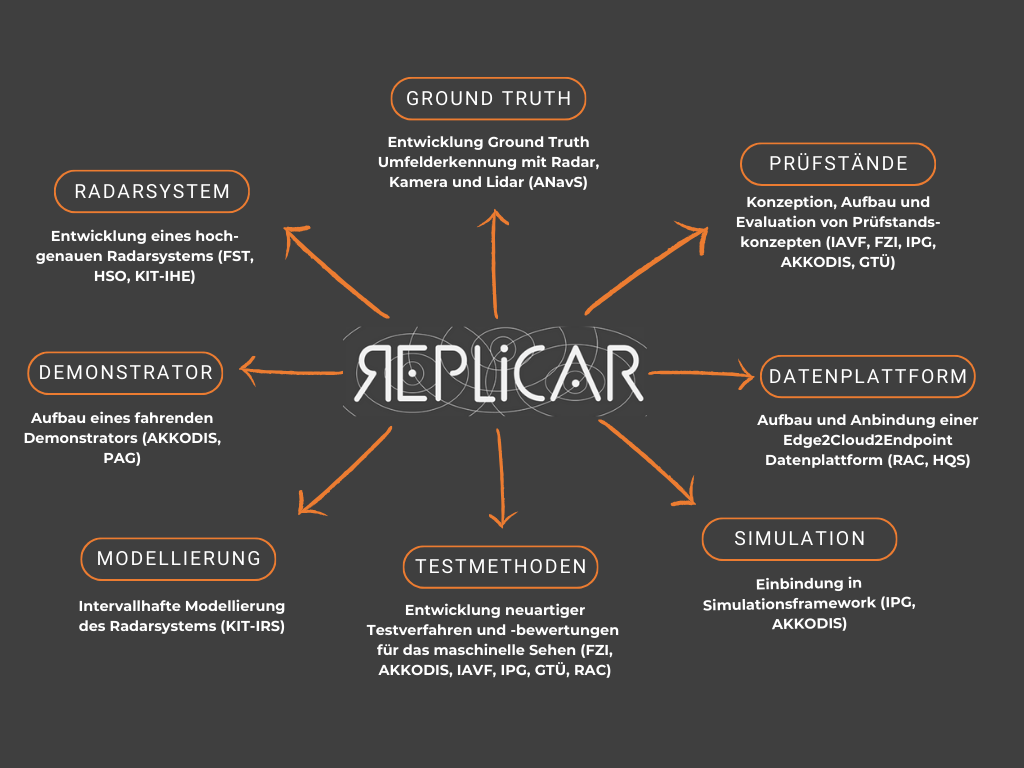
Um die fehlende Datengrundlage für die Validierung von Sensoren für das automatisierte Fahren zu erzeugen, soll ein Referenzsystem aus Radar, Kamera, Lidar, GPS und Inertialsensorik aufgebaut und in einen Versuchsträger integriert werden. Diese Referenzsensorik ist der heutigen Seriensensorik mehrere Jahre voraus und stellt die Grundlage zur Erfassung von genauen Sensordaten dar. Dafür entwickeln das KIT-IHE, die HSO und FST ein hochgenaues Radarsystem, welches ein wesentliches Element im Referenzsystem zur Umfeldwahrnehmung ist und durch das KIT-IRS intervallhaft beschrieben wird. Der Konsortialführer ANavS ermöglicht mit der Entwicklung einer präzisen Umfeldwahrnehmung und einer hochgenauen Datenfusion die Erzeugung einer genauen Abbildung der Wirklichkeit, eine sogenannte „Ground Truth“, zur Verwendung in Validierungsprozessen.